Info pagina ATMega328 HBO5 Elektronica
Ik zal eerst wat info over microcontrollers geven alvorens we dieper op de ATMega328 ingaan :
|
Grondige berschrijving (datasheet) van de ATMega328.
Omschrijving registers
ATmel heeft zelf een cursus programmeren ontworpen.
En we hebben ook nog een cursus C++
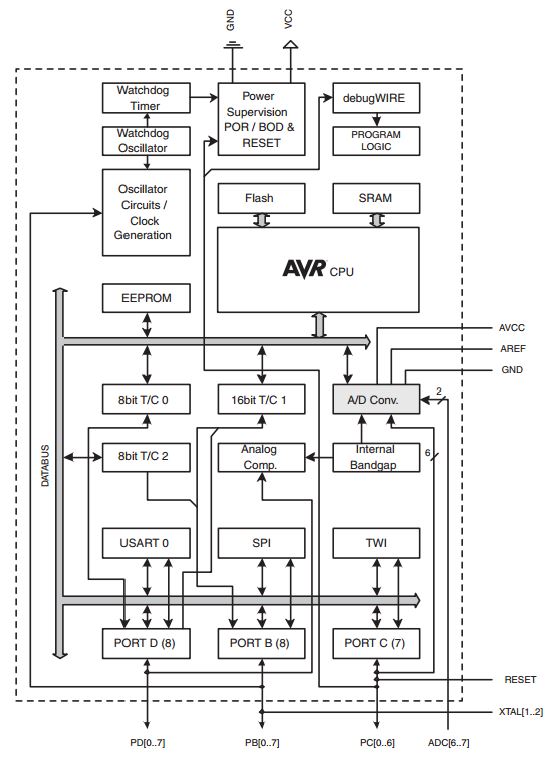
De ATMega328 is een 8-bit microcontroller met 32K flash , 2K ram geheugen en draait op 16 MHz.

Als je zoekt naar het bestand "iom328p.h" bij Dependencies kan je zien welke registers beschikbaar zijn in je software
GPIO (General Purpose IO)
De Arduino Uno is een bord gebaseerd op de ATmega328 chip. Deze Uno heeft 14 digitale input / output pinnen (waarvan er 6 gebruikt kunnen worden als PWM outputs), 6 analoge inputs.Elke pin kan 20 mA leveren of ontvangen en heeft een interne pull-up weerstand (default ontkoppeld) van 20-50k ohm.
Sommige pinnen hebben een speciale functie :
|
Pin-mapping : 
|
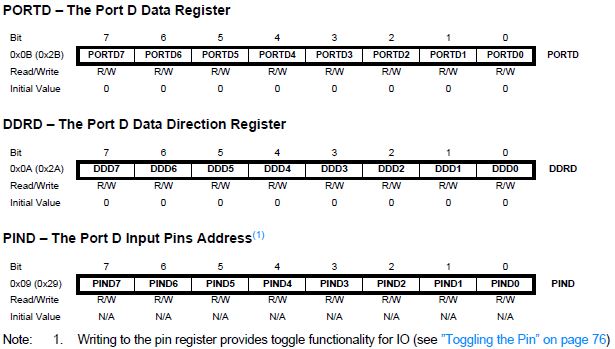
DDRD - The Port D Data Direction Register - read/write (default 0x00, as input configured)
PORTD - The Port D Data Register - read/write
PIND - The Port D Input Pins Register - read only
Toggling the Pin :
Writing a logic one to PINxn toggles the value of PORTxn, independent on the value of DDRxn.
Note that the SBI instruction can be used to toggle one single bit in a port.
PORTB maps to Arduino digital pins 8 to 13 The two high bits (6 & 7) map to the crystal pins and are not usable
DDRB - The Port B Data Direction Register - read/write
PORTB - The Port B Data Register - read/write
PINB - The Port B Input Pins Register - read only
PORTC maps to Arduino analog pins 0 to 5. Pins 6 & 7 are only accessible on the Arduino Mini
DDRC - The Port C Data Direction Register - read/write
PORTC - The Port C Data Register - read/write
PINC - The Port C Input Pins Register - read only
DDRD = 0b11111111; All pins in PORTD are outputs
PORTD = 0b11111111; All pins in PORTD are high
PORTD = 0b00000000; All pins in PORTD are low
PORTD = 0b10101010; The small on,off,on,.. pattern
DDRD = 0b00000000; All pins in PORTD are inputs
char my_var = 0; Create a variable to store the data read from PORTD
my_var = PIND; Read the PORTD and put the values in the variable
DDRD = (1<
DDRD = 0b11111101; Pin 1 of PORTD is an input, all others are outputs
char my_var = 0; Create a variable to store the data read from PORTD
my_var = (PIND & (1<
DDRD = 0b11111100; Portd pins 0 and 1 are inputs, all the others are outputs
if(PIND & ((1<
}
DDRD &= ~(1<
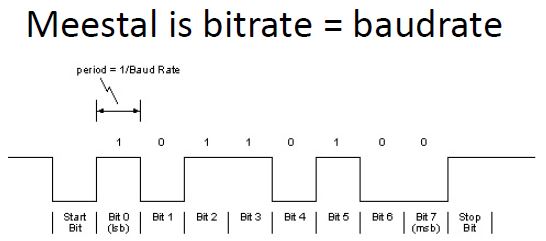
U(S)ART (Seriele communicatie)
De breedte van het ontvangen (te versturen) pakket is afhankelijk van :- Start bit
- Data byte (5, 6, 7, 8 of 9 bits)
- Stop bit (1 of 2 bits)
- Parity bit (optioneel)
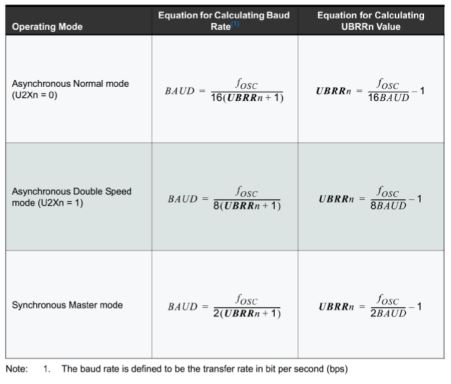
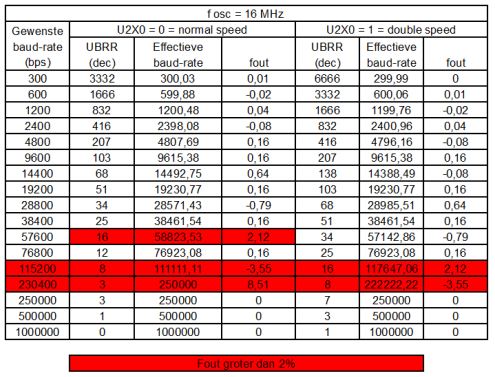
UBRR0 = UBRR0 = Uart Baud Rate Register voor UART0
- Arduino : Serial.begin(9600); - C : waarde opzoeken of berekenen : UBRR0 = 103;
- UBRR0H = 0;
- UBRR0L = 103;
void loop()
{
Serial.begin(9600); // ik wijzig deze waarde telkens om te testen
// Deze Serial.begin rekent uit welke waarde hij in de registers UBRR0L en UBRR0H moet stoppen
// Omdat dit 2 bytes zijn moeten we ze afzonderlijk naar de UART (UDR0) sturen
// We moeten natuurlijk hierbij ook weten of de UART op normal of double speed staat
char_U2X0_waarde=U2X0;
if (char_U2X0_waarde == 0)
{
USART_SendStringLF(Txt_Normal_Speed);
}
else
{
USART_SendStringLF(Txt_Double_Speed);
}
USART_SendStringLF(Txt_UBRR0L_waarde);
UBRR0x_waarde=UBRR0L;
USART_SendByte(UBRR0x_waarde);
USART_SendByte(LF);
USART_SendStringLF(Txt_UBRR0H_waarde);
UBRR0x_waarde=UBRR0H;
USART_SendByte(UBRR0x_waarde);
USART_SendByte(LF);
}
Afkortingen
|
Ga in Amel Studio naar Tools -external tools
Vul het het venster datje ziet in met deze gegevens :
• Naam van je tool ( Bv 'Arduino on COM5)
• Pad naar 'avrdude.exe' (C: 'avrdude.exe' (C:\Program Files(x86)\Arduino\hardware\tools\avr\bin\avrdude.exe)
• -C"C:\Program Files (x86)\Arduino\hardware\tools\avr\etc\avrdude.conf" -v -patmega328p -carduino -PCOM4 -b115200 -D -Uflash:w :"$(ProjectDir)Debug \$(TargetName).hex":i